Sequential Planning via Anchored Robotic Keypoints
Under Review
Training free neurosymbolic protocol for robotic manipulation generalization
I am a 2nd-year Electrical Engineering Ph.D. student at Case Western Reserve University, where I’m advised by Peng “Edward” Wang. I received my dual B.S. in Electrical and Computer Engineering from the University of Kentucky in 2024, and I’m currently funded by the NSF GRFP. Previously, I spent time at Mercor on the Applied AI team, running data analytics and model evals.
I’m interested in making robotic perception and manipulation more robust and interpretable. I've developed geometric and algebraic methods for perception1,2, studied the mechanistic structure of transformers and vision-language-action models3,4, and built neurosymbolic planning that generalizes across embodiments5. These days I’m extending this to manipulation grounded in audio and touch.
Updates
🇧🇷 Apr 2026 Attending ICLR in Rio to present Action Atlas and Sheaf Interpretability
👁️ Dec 2025 Awarded a NVIDIA Academic Grant for our Neuro-symbolic SPARK project
🤖 Oct 2025 Attending IROS in Hanzghou to present QUAN
🧭 Apr 2025 Awarded the NSF GRFP
🎓 Aug 2024 Started my PhD at Case Western Reserve University
💻 May - Aug 2024 PhD intern at HP focused on multi-agents, RAG, and anomaly detection
😼 May 2024 Graduated from the University of Kentucky with a dual BS in Electrical & Computer Engineering
* denotes equal contribution
Under Review
Training free neurosymbolic protocol for robotic manipulation generalization
Under Review | ICLR 2026 MM Intelligence Workshop (Oral)
A mechanistic interpretability study revealing how different features contribute unequally to robotic action prediction in vision-language-action models.
Under Review
A geometry-aware approach to 3D localization that achieves semantic consensus without requiring camera pose information.
Under Review | ICLR 2026 UCLR Workshop
A sheaf-theoretic framework for decomposing and understanding how transformer models compose local contextual representations into global meaning.
IROS 2025
Rotation-aware perception layers composed with quaternion algebra so we keep spatial intuition while training compact real-valued networks
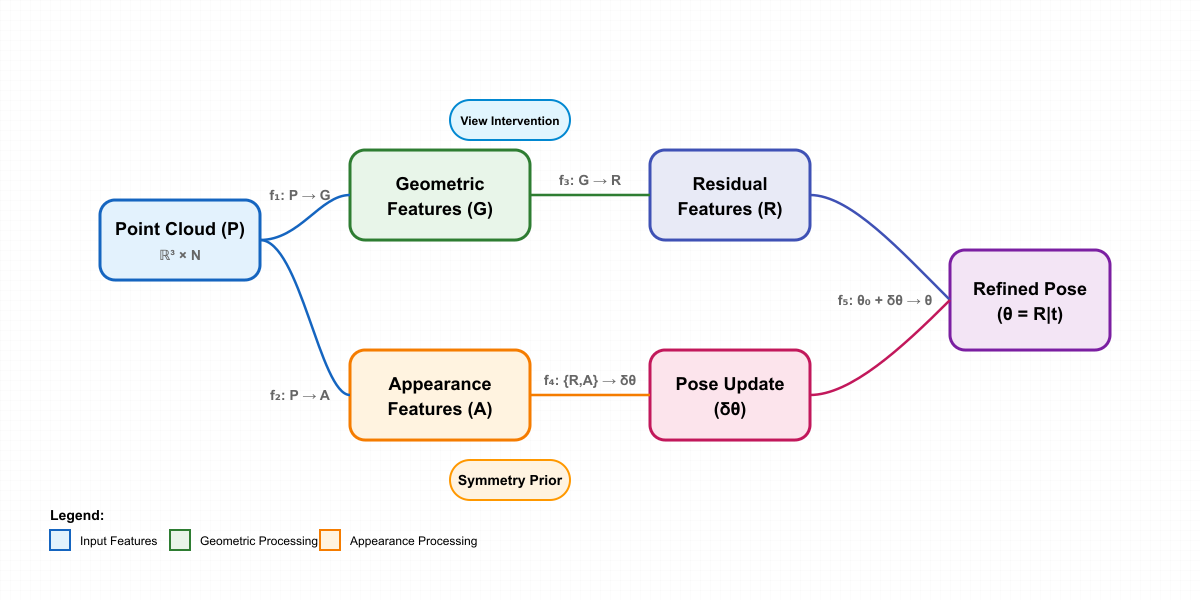
Refines 6D pose estimates using causal interventions and backdoor adjustments based on structural causal models. Improves robustness to viewpoint ambiguity and symmetry.
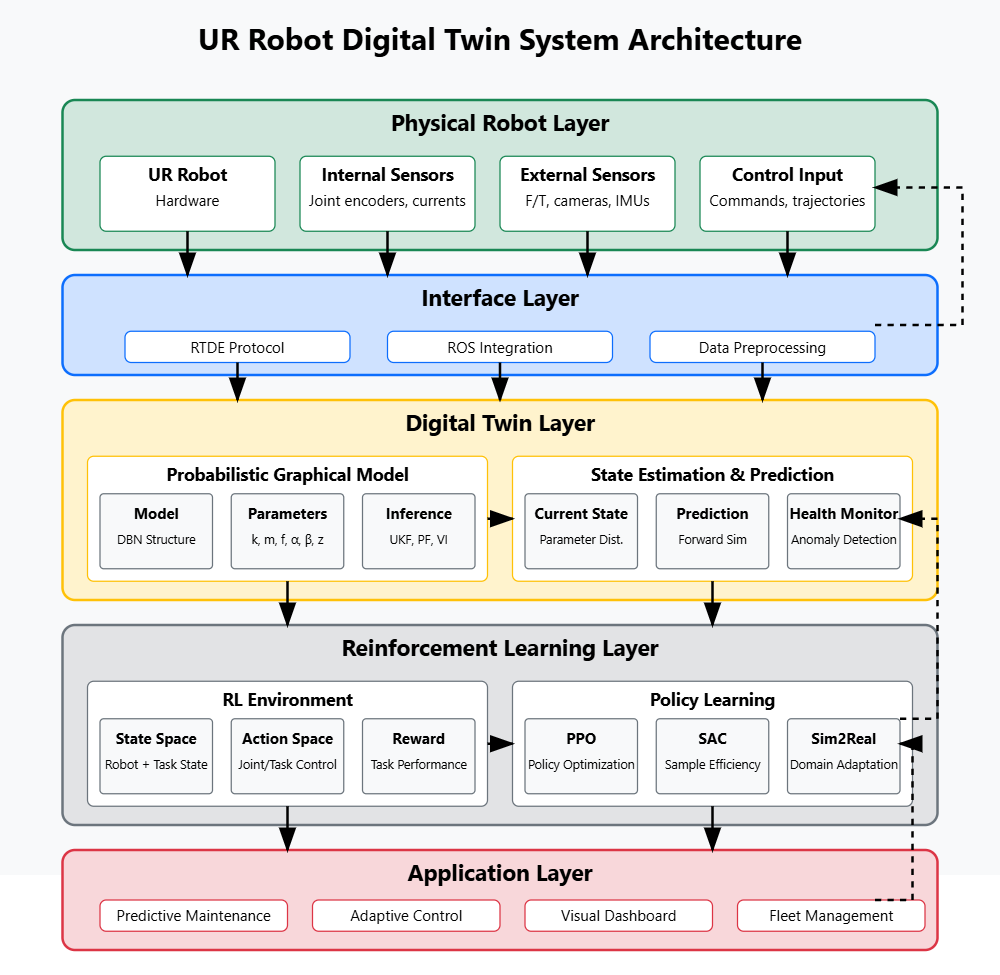
ROS2-integrated Dynamic Bayesian Network for real-time fault detection in Universal Robots using Unscented Kalman Filtering to track friction, damping, and wear parameters.

Machine learning system for detecting obstructive sleep apnea events using physiological signal processing and deep learning techniques for real-time classification of respiratory disturbances.