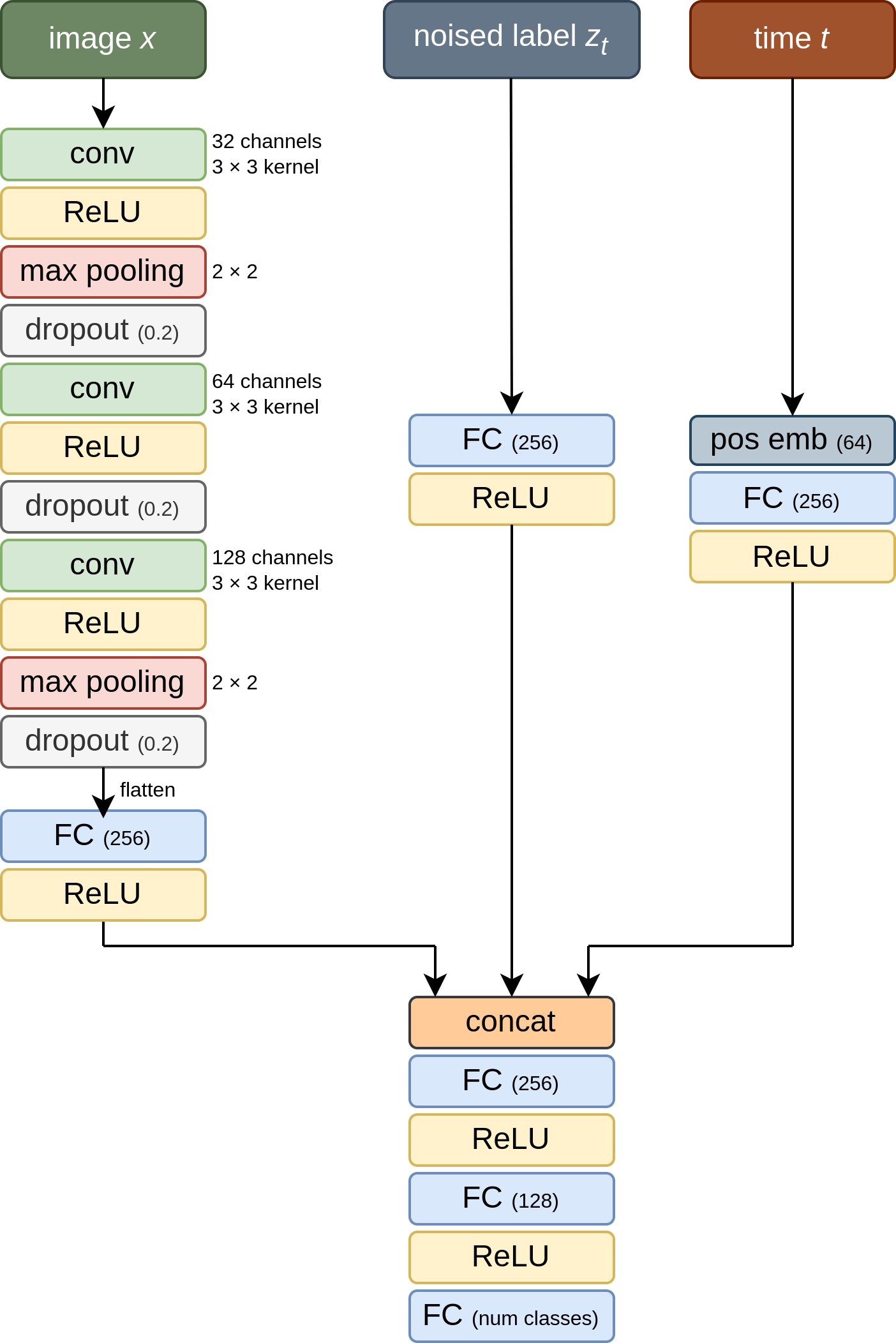
No-Propagation Diffusion Models in Robotics
Explores Denoising Diffusion Probabilistic Models using a NoProp training method. Surveys their use in robotics.
Personal projects from 2023-2024.
Explores Denoising Diffusion Probabilistic Models using a NoProp training method. Surveys their use in robotics.

Social navigating robot designed to provide an immersive telepresence experience for remote users. Led development of the robot's 3D SLAM system with servo-mounted LiDAR, path planning, and autonomous navigation. Achieved real-time mapping and dynamic obstacle avoidance in healthcare environments.
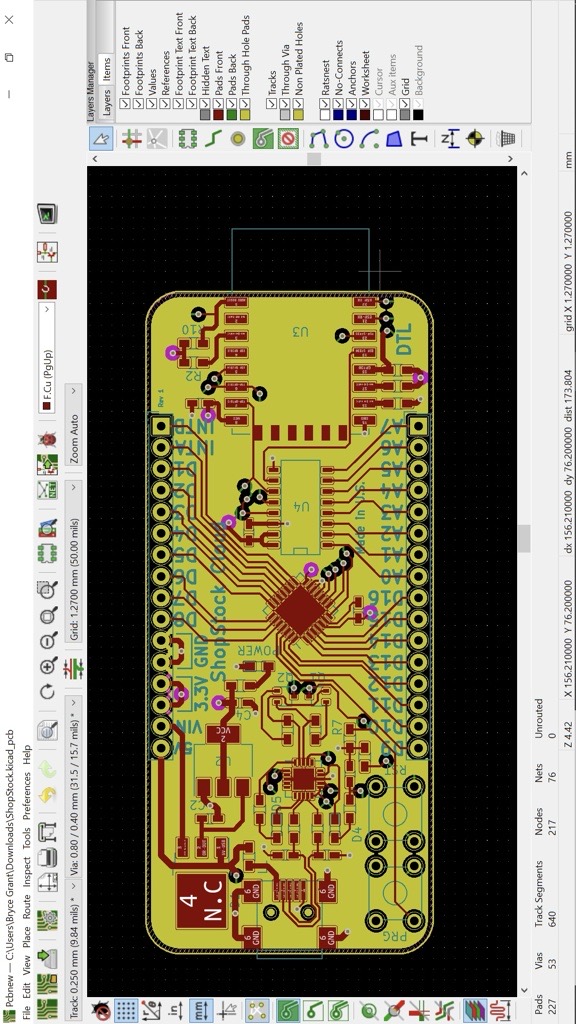
IoT hardware bridge for retrofitting legacy point-of-sale systems with cloud-based inventory tracking. Built custom firmware for an ESP-32 microcontroller enabling real-time inventory synchronization. Co-founded ShopStock LLC and deployed the system across multiple retail locations.